
|
Methods of Runtime Evaluation |

Methods of Runtime Evaluation |
Evaluating with Average |

|
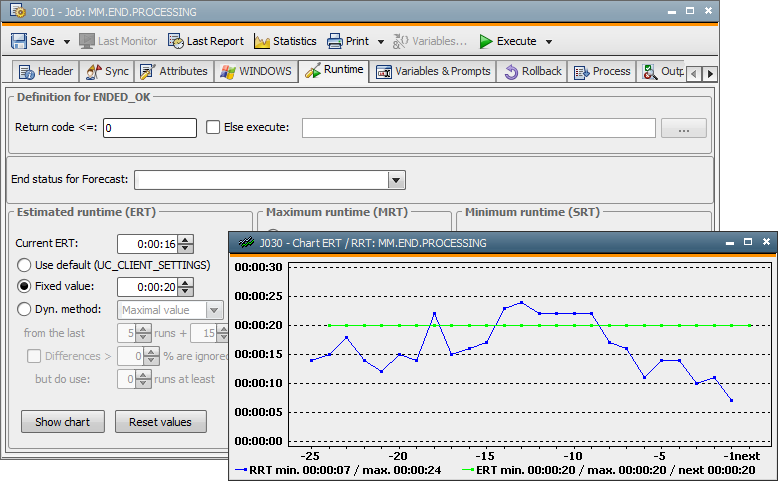
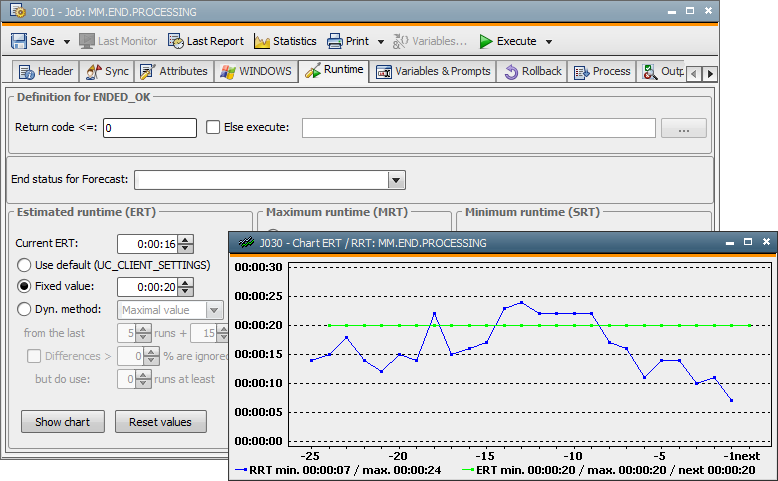
With this setting, a static limit is specified for the runtime. This fixed value is taken as the estimated runtime (ERT). Automic recommends verifying from time to time if it still meets all requirements.
Forecast
The completed execution is assessed too high because it always starts from
the maximum permissible runtime (worst case). Therefore, the forecast
cannot give realistic values.
Minimum Runtime Supervision
Always results in ELSE action because the real runtime is always below
the specified ERT.
Maximum Runtime Supervision
Never results in ELSE action because the specified ERT is never reached.
Setting the Latest
End
If the frame for the complete execution is too limited, the task will be
executed only occasionally or, in extreme cases, never, even though the
time would have been adequate for a real run.
Forecast
The completed execution is assessed too low because the real runtime is
mostly above the set value. Therefore, the forecast cannot give realistic
values.
Minimum Runtime
Supervision
Occasional ELSE actions occur because the real runtime is mostly above
the specified ERT.
Maximum Runtime
Supervision
Too many ELSE actions occur because the specified ERT is exceeded.
Setting
the Latest Possible End
The estimated runtime of the task is too short because the fixed value
is set too low. Therefore, a task is often started although there is not
enough time for a real run (due to the setting of the latest possible
end).